![[HDmap] VectorNet(CVPR'20) - HDmap을 인코딩하는 알고리즘](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2FBe5lD%2FbtrLSunuJCL%2FAAAAAAAAAAAAAAAAAAAAADf1UYv642-8gPk84VSybdDbahODMHGxds8z85opXMWG%2Fimg.png%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1764514799%26allow_ip%3D%26allow_referer%3D%26signature%3DgwALgLOgEEw3lrDGilBPgP6k1sg%253D)
반응형
# Title
VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation (CVPR, 20) [code]# Motivation
- 기존의 방법은 HD map을 color-coded attributes(RGB)로 rendering해 rasterized representation으로 manual하게 변경한 후, Convolution을 이용해 인코딩함.
- 하지만 이는 ConvNet의 제한된 receptive field로 인해 context representation을 잘 포착하지 못한다는 문제. 따라서 agent dynamics와 structured scene context를 directly하게 학습할 수 있는 vectorized representation이 필요

# Methodology
“Vectorize agent trajectories & HD maps interaction”
- Hierarchical GNN for capturing high-order interaction
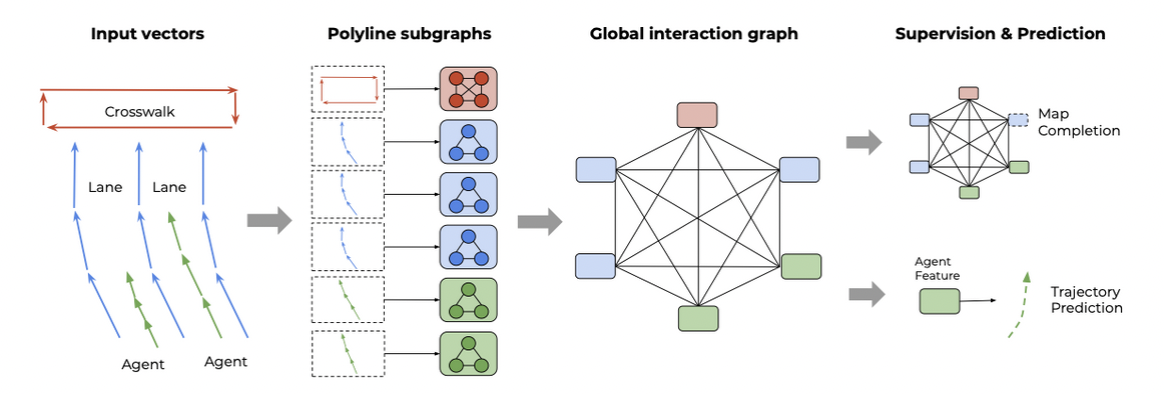
1. Vectorize all elements(agent + map)
- Map features : starting point와 direction을 정하고, spline에서 uniformly하게 keypoint를 sampling 한 후, 이웃한 keypoint를 연결해서 vector로 만듦
- Agent trajectories : 일정한 시간 간격으로 keypoint를 sampling한 후, 이들을 연결해 vector로 만듦
- Trajectory와 map annotation는 vector와 one-to-one mapping
- 위 Vector는 graph에서 node feature로 작용함d는 좌표, a는 attribute feature, j는 polyline id
2. Construct polyline subgraphs - Hierarchical approach
- Polyline을 구성하는 node feature들을 각각 layer 별로 hierarchical하게 aggregation
- 마지막에 maxpooling을 통해 polyline level feature를 생성하는게 목표

3. Global graph for High-order interactions
- Polyline node feature 들을 single GNN을 통해 global interaction graph로 만듦
- GT를 무작위로 마스킹하는 auxiliary graph completion 적용

4. Overall loss
- 경로예측을 위한 음의 가우시안 MLE + graph completion을 위한 Huber loss
- 기존의 방법은 HD map을 color-coded attributes(RGB)로 rendering해 rasterized representation으로 manual하게 변경한 후, Convolution을 이용해 인코딩함.
- 하지만 이는 ConvNet의 제한된 receptive field로 인해 context representation을 잘 포착하지 못한다는 문제. 따라서 agent dynamics와 structured scene context를 directly하게 학습할 수 있는 vectorized representation이 필요
반응형
'Autonomous Driving 🚙 > HDmap' 카테고리의 다른 글
| [HDMap] HDMapNet (ICRA'22) - 이미지로부터 HDMap을 생성하기 (0) | 2022.12.23 |
|---|---|
| [HDMap] HDMap 밴치마크 데이터셋 정리 - nuScenes, Argoverse.. (0) | 2022.12.23 |