![[HDMap] HDMapNet (ICRA'22) - 이미지로부터 HDMap을 생성하기](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2F2bu1v%2FbtrUs3oh1V1%2FAAAAAAAAAAAAAAAAAAAAANhm-_llmdvp3Li_vzK2z_rw-ioljFmbU4BTzFA0yRNj%2Fimg.png%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1764514799%26allow_ip%3D%26allow_referer%3D%26signature%3DEdIvCWEQILk9YKFtplswxtu%252BBu0%253D)
반응형
Title
HDMapNet: An Online HD Map Construction and Evaluation Framework (ICRA’22)Motivation
- HD semantic map을 생성하는 기존의 방법은 manually하게 annotation이 필요한 과정이 많음
- 따라서 이를 개선하기 위해 on-board sensor (surrounding camera + lidar)를 이용해 vectorized local semantic map을 생성하는 framework 제안
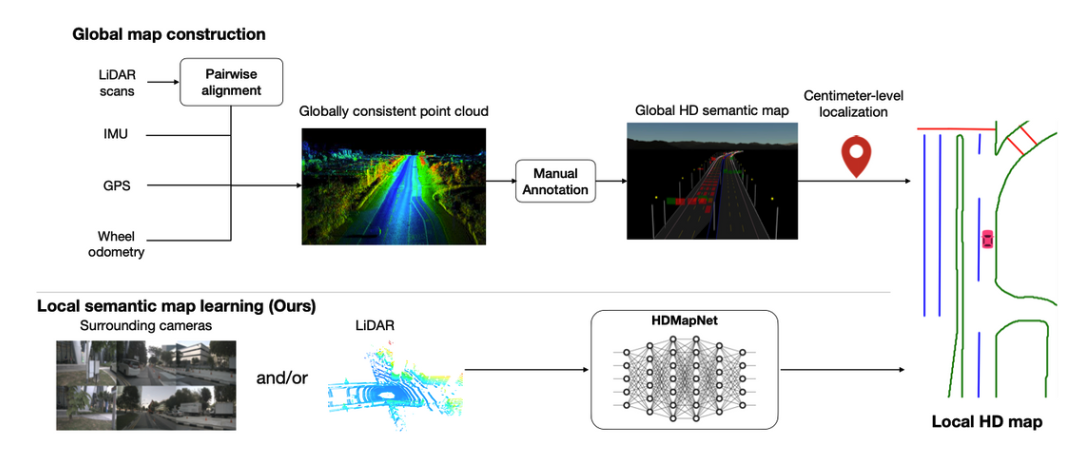
- Ego vehicle의 정확한 pose를 추정하는 것은 non-linear least-square 문제임을 지적
Methodology
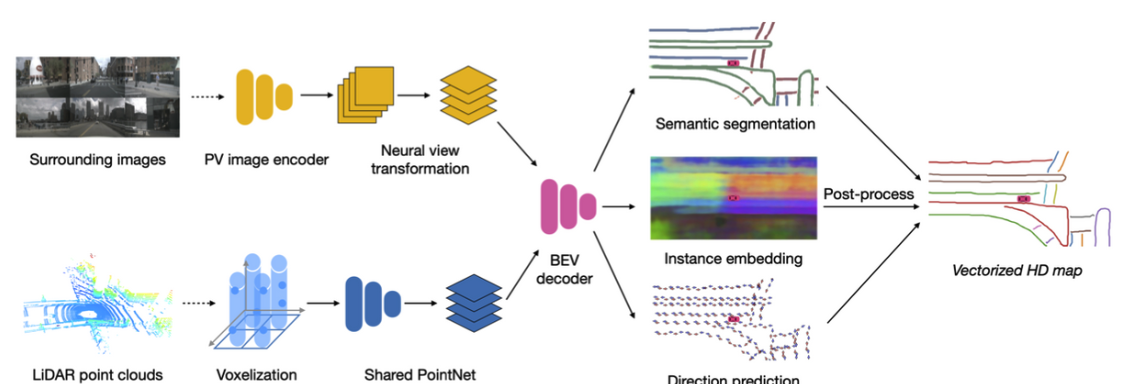
- Image encoder : Surrounding image에서 ego vehicle coordinate로 변환
- Point encoder : PointPillar 인코더 사용
- BEV encoder
Experiments

- nuScenes dataset으로 semantic map segmentation & instance detection에 대해 성능 측정
- Metrics : 직접 propose
Semantic metrics- Eulerian metrics : Dense representation of shapes(curves rasterized on a grid) 사이의 IOU(Intersection-over-union)
- Lagrangian metrics : 점으로 구성된 curve들 사이 spatial distance를 측정 (Chamfer Distance 사용)
Instance metrics- Average Precision
- Average Precision
- 기존의 HD map generation 모델들과 결과 비교

반응형
'Autonomous Driving 🚙 > HDmap' 카테고리의 다른 글
| [HDMap] HDMap 밴치마크 데이터셋 정리 - nuScenes, Argoverse.. (0) | 2022.12.23 |
|---|---|
| [HDmap] VectorNet(CVPR'20) - HDmap을 인코딩하는 알고리즘 (0) | 2022.09.12 |